This project is aimed at early prediction of Parkinson’s disease through computerized analysis of online handwriting samples. While a number of clinical evaluations are carried out to diagnose the Parkinson’s disease, most of these tests are effective only once the disease is at a relatively advanced stage. Studies have shown that analysis of handwriting can be used as a valuable tool for prediction of Parkinson’s disease at very early stages. In the proposed research, we have employed raw signals captured by a digitizer tablet while attempting several writing and drawing templates, to compute various kinematic, temporal, and pen-based attributes. In addition to these online dynamic attributes, static offline visual features are also extracted using state-of-the-art Convolutional Neural Networks (CNNs). The developed tools allow practitioners to collect handwriting and drawing samples of subjects and employ a combination of different types of features (online and offline) for the analysis and prediction.
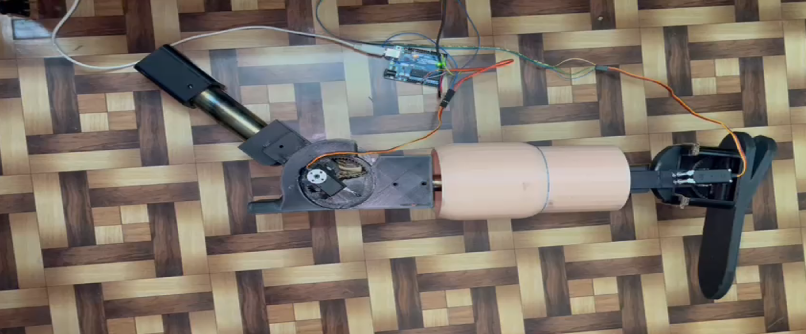
A robotic leg is similar to a prosthetic leg. However, a robotic leg can be controlled electrically or mechanically. To have the robotic leg emulate human leg behaviors, surgeons must redirect the nerves that previously controlled some of the person’s lower-leg muscles to cause the thigh muscles to contract.
Moetesum, M., Diaz, M., Masroor, U., Siddiqi, I., & Vessio, G. (2022). A survey of visual and procedural handwriting analysis for neuropsychological assessment. Neural Computing and Applications, 1-18.
Diaz, M., Moetesum, M., Siddiqi, I., & Vessio, G. (2021). Sequence-based dynamic handwriting analysis for Parkinson’s disease detection with one-dimensional convolutions and BiGRUs. Expert Systems with Applications, 168, 114405.
Moetesum, M., Siddiqi, I., Javed, F., & Masroor, U. (2020, September). Dynamic Handwriting Analysis for Parkinson’s Disease Identification using C-BiGRU Model. In 2020 17th International Conference on Frontiers in Handwriting Recognition (ICFHR) (pp. 115-120). IEEE.